Im letzten Kapitel haben wir den Begriff der kovarianten Ableitung
und den dazu gleichwertigen Begriff der Parallelverschiebung kennengelernt.
Diese Begriffe ermöglichen es uns, affine Geometrie auf differenzierbaren Mannigfaltigkeiten
zu betreiben. Als ein Beispiel haben wir die geodätische Linie kennengelernt.
Es gibt noch weitere Möglichkeiten, die kovariante Ableitung und die
Parallelverschiebung dazu zu nutzen, neue geometrische Begriffe wie Krümmung und Torsion
zu formulieren. In diesem Kapitel werden wir uns zunächst mit der Torsion beschäftigen.
Die Krümmung folgt dann im nächsten Kapitel.
Der Begriff der Metrik wird weiterhin nicht benötigt – der affine Zusammenhang
(d.h. die kovariante Ableitung und die zugehörige Parallelverschiebung) genügt.
Daher müssen wir vorsichtig sein, wenn wir uns die Begriffe veranschaulichen wollen – bei
einer Einbettung ist im Hintergrund immer eine Metrik mit im Spiel.
Bisher haben wir bei der kovarianten Ableitung und der Parallelverschiebung
die Mannigfaltigkeit immer nur in einer bestimmten Richtung untersucht.
Wir haben uns beispielsweise die Veränderung von Tangentialvektoren in Richtung
eines anderen Tangentialvektors angesehen.
Nun wollen wir einen Schritt weiter gehen und Richtungswechsel mit einbeziehen.
Dabei werden zweite Ableitungen auftreten, d.h. wir werden uns für die Veränderung
von Veränderungen interessieren, was physikalisch gesehen etwas mit Beschleunigungen
zu tun haben wird.
Anschaulich hat eine Beschleunigung ja etwas mit der Krümmung einer Bahnkurve
zu tun – es wundert daher nicht, dass uns der Krümmungsbegriff über den Weg laufen wird.
Dabei kann die Angelegenheit allerdings aufgrund der möglichen Richtungswechsel
kompliziert werden. Wir können beispielsweise fragen: Wie ändert sich in \(v\)-Richtung
eine Richtungsableitung in \(u\)-Richtung? Und wie verhält sich dies im Vergleich zu
der Änderung in \(u\)-Richtung der Richtungsableitung in \(v\)-Richtung (also genau umgekehrt)?
Infinitesimale Parallelogramme
Um das Thema systematisch zu untersuchen, wollen wir ein infinitesimales Parallelogramm
konstruieren. Dazu starten wir in einem Punkt \(p_{0}\)
mit zwei Tangentialvektorfeldern \(u(p_{0})\) und \(v(p_{0})\), die die Seiten
unseres Parallelogramms definieren sollen.
Wir wählen nun zu dem Tangentialvektor \(u(p_{0})\) eine geodätische Kurve
\(\gamma_{0}(t)\) so, dass \(u(p_{0})\) Tangentialvektor zur Kurve in
\(t = 0\) ist. Analog wählen wir eine geodätische Kurve \(\rho_{0}(t')\)
zum Tangentialvektor \(v(p_{0})\). Für die Wirkung der Tangentialvektoren
auf eine skalare Funktion \(\phi\) gilt dann:
\[
u(p_{0}) \, \phi =
\frac{d}{dt} \phi(\gamma_{0}(t)) \bigg|_{t = 0}
\]
\[
v(p_{0}) \, \phi =
\frac{d}{dt'} \phi(\rho_{0}(t')) \bigg|_{t' = 0}
\]
mit
\[
p_{0} = \gamma_{0}(0) = \rho_{0}(0)
\]
Wir laufen nun von \(p_{0}\)
ein kleines Stück \(\epsilon\) entlang der Kurve \(\gamma_{0}\) in \(t\)-Richtung
(gegeben durch \(u(p_0)\)) und paralleltransportieren die Tangentialvektoren mit.
Den entsprechenden Punkt nennen wir
\[
p_{1} = \gamma_{0}(\epsilon)
\]
(siehe das Bild weiter unten).
Da \( \phi(p_{1}) = \phi(\gamma_{0}(\epsilon)) \)
eine Funktion von \(\mathbb{R}\) nach \(\mathbb{R}\) ist, können wir diese für kleine \(\epsilon\)
in eine Taylorreihe entwickeln. Dabei wollen wir bis zu quadratischen Termen gehen und alle
weiteren Terme weglassen:
\[
\phi(p_{1})
= \phi(p_{0}) +
\frac{d}{dt} \phi(\gamma_{0}(t)) \bigg|_{t = 0} \cdot \epsilon +
\]
\[ +
\frac{1}{2} \,
\frac{d^2}{dt^2} \phi(\gamma_{0}(t)) \bigg|_{t = 0} \cdot \epsilon^{2}
+ \, ...
\]
Die erste Ableitung können wir schreiben als
\[
\frac{d}{dt} \phi(\gamma_{0}(t)) \bigg|_{t = 0}
=
u(p_{0}) \, \phi
\]
denn so ist der Tangentialvektor \(u(p_{0})\) ja definiert.
Wie aber sieht es mit der zweiten Ableitung aus?
Nehmen wir sie schrittweise auseinander (der Parameter \(t'\) hat hier nichts
mit der zweiten Kurve \(\rho_{0}\) zu tun, sondern er wird nur zur Unterscheidung von \(t\) so genannt):
\[
\frac{d^2}{dt^2} \phi(\gamma_{0}(t)) \bigg|_{t = 0}
=
\]
\[
=
\frac{d}{dt} \bigg|_{t = 0} \, \frac{d}{dt'} \bigg|_{t' = t} \,
\phi(\gamma_{0}(t')) = \]
\[
=
\frac{d}{dt} \bigg|_{t = 0} \, u(\gamma_{0}(t)) \, \phi =
\]
\[
=
u(p_{0}) \, (u \, \phi)
\]
Dabei ist \( u \, \phi \) eine reellwertige Funktion auf der Mannigfaltigkeit,
die als
\[
(u \, \phi)(p) := u(p) \, \phi
\]
definiert ist.
Mit dieser Schreibweise erhalten wir dann:
\[
\phi(p_{1})
= \phi(p_{0}) +
[u(p_{0}) \, \phi] \, \epsilon +
\]
\[ +
\frac{1}{2} \, [u(p_{0}) \, (u \, \phi)] \, \epsilon^{2} + \, ...
\]
Analog können wir von \(p_{0}\) ausgehend
ein kleines Stück \(\epsilon'\) entlang der anderen Kurve \(\rho_{0}\)
in \(t'\)-Richtung (gegeben durch \(v(p_0)\)) laufen.
Den entsprechenden Punkt nennen wir
\[
p_{2} = \rho_{0}(\epsilon')
\]
Ergebnis:
\[
\phi(p_{2})
= \phi(p_{0}) +
[v(p_{0}) \, \phi] \, \epsilon' +
\]
\[ +
\frac{1}{2} \, [v(p_{0}) \, (v \, \phi)] \, (\epsilon')^{2} + \, ...
\]
Nun kommt der zweite Schritt: Ausgehend vom Punkt \(p_{1}\)
laufen wir nun ein Stück \(\epsilon'\) in \(t'\)-Richtung, die durch den Vektor
\(v(p_{1})\) und eine dazugehörige Kurve \(\rho_{\epsilon}(t')\)
gegeben ist. Den neuen Punkt nennen wir \(p_{3}\),
d.h.
\[
p_{3} = \rho_{\epsilon}(\epsilon')
\]
Dann ist
\[
\phi(p_{3})
= \phi(p_{1}) +
[v(p_{1}) \, \phi] \, \epsilon' +
\]
\[ +
\frac{1}{2} \, [v(p_{1}) \, (v \phi)] \, (\epsilon')^{2} + \, ...
\]
Wichtig ist dabei, dass \( v(p_1) \) parallel zu \( v(p_0) \) sein soll,
denn er soll auf dem Weg von \(p_0\) zu \(p_1\) durch Parallelverschiebung entlang der Kurve \(\gamma_0\) aus
\( v(p_0) \) hervorgehen – wir wollen ja ein Parallelogramm bauen!
Analog laufen wir
ausgehend vom Punkt \(p_{2}\)
ein Stück \(\epsilon\) in \(t\)-Richtung, die durch den Vektor
\(u(p_{2})\) und eine dazugehörige Kurve \(\gamma_{\epsilon'}(t)\)
gegeben ist. Den neuen Punkt nennen wir \(p_{4}\),
d.h.
\[
p_{4} = \gamma_{\epsilon'}(\epsilon)
\]
Dann ist
\[
\phi(p_{4})
= \phi(p_{2}) +
[u(p_{2}) \, \phi] \, \epsilon +
\]
\[ +
\frac{1}{2} \, [u(p_{2}) \, (u \phi)] \, \epsilon^{2} + \, ...
\]
Wichtig ist auch hier, dass \( u(p_2) \) parallel zu \( u(p_0) \) sein soll,
denn er soll auf dem Weg von \(p_0\) zu \(p_2\) durch Parallelverschiebung entlang der Kurve \(\rho_0\) aus
\( u(p_0) \) hervorgehen
Vom Punkt \(p_{0}\) aus laufen wir in \(u(p_{0})\)-Richtung
ein kleines Stück \(\epsilon\) zum Punkt \(p_{1}\) und dann ein Stück
\(\epsilon'\) in \(v(p_{1})\)-Richtung zum Punkt \(p_{3}\).
Andererseits laufen wir
in \(v(p_{0})\)-Richtung
ein kleines Stück \(\epsilon'\) zum Punkt \(p_{2}\) und dann ein Stück
\(\epsilon\) in \(u(p_{2})\)-Richtung zum Punkt \(p_{4}\).
Die Punkte \(p_{3}\) und \(p_{4}\) sind nicht unbedingt identisch.
Sind sie verschieden, so liegt Torsion vor,
was sich im Bild in einer
Art Schraubenversetzung äußert – mehr dazu weiter unten.
Die Lie-Klammer
Wir interessieren uns nun für die Differenz \( \phi(p_{4}) - \phi(p_{3}) \)
in unserem infinitesimalen Parallelogramm,
wobei wir schrittweise die obigen Taylorreihen einsetzen werden. Ziel wird es sein, alle Terme
auf den Punkt \(p_{0}\) zu beziehen und nur Terme bis zur zweiten Ordnung in den
Parametern \(\epsilon\) und \(\epsilon'\) zu behalten, denn wir wollen das Parallelogramm
infinitesimal klein machen. Hier sind die einzelnen Rechenschritte:
\[
\phi(p_{4}) - \phi(p_{3}) =
\]
\[
=
\phi(p_{2}) +
[u(p_{2}) \, \phi] \, \epsilon +
\]
\[
\frac{1}{2} \, [u(p_{2}) \, (u \, \phi)] \, \epsilon^{2} +
\]
\[
-
\phi(p_{1}) -
[v(p_{1}) \, \phi] \, \epsilon' +
\]
\[ -
\frac{1}{2} \, [v(p_{1}) \, (v \, \phi)] \, (\epsilon')^{2} + \, ...
= \]
\[ = \, ...
\]
Für \( \phi(p_{2}) \) und \( \phi(p_{1}) \) können wir direkt die Taylorreihen von oben einsetzen.
Was aber ist beispielsweise mit \( u(p_{2}) \, \phi \), also mit der Richtungsableitung
von \(\phi\) im Punkt \(p_{2}\) in u-Richtung?
Man kann zeigen, dass wir
aufgrund der Parallelität der Tangentialvektoren \( u(p_{2}) \)
und \( u(p_{0}) \) sowie aufgrund der Taylorreihe
\[
\phi(p_{2}) =
\phi(p_{0}) +
[v(p_{0}) \, \phi] \, \epsilon' + \, ...
\]
bis zur ersten Ordnung schreiben dürfen:
\[
u(p_{2}) \, \phi =
u(p_{0}) \, \phi +
u(p_{0}) \, [v \, \phi] \, \epsilon' + \, ...
\]
und analog
\[
v(p_{1}) \, \phi =
v(p_{0}) \, \phi +
v(p_{0}) \, [u \, \phi] \, \epsilon + \, ...
\]
(d.h. Abweichungen davon treten erst eine Ordnung höher auf).
Diese Formeln müsste man genau genommen noch strenger begründen,
was in der Literatur jedoch bisweilen nicht geschieht.
Relativ sauber findet man dies in
Matt Visser: Math 464: Notes on differential geometry.
Die Begründung basiert darauf, dass wir die Tangentialvektoren entlang von Geodäten
von Punkt zu Punkt parallelverschieben, so dass sich deren Änderung in der betrachteten Ordnung von
\(\epsilon\) und \(\epsilon'\) nicht auswirkt.
Die Punkte bilden ja die Ecken eines infinitesimalen Parallelogramms, bei dem
die \(u\)-Richtungsvektoren bzw. die \(v\)-Richtungsvektoren in den Eckpunkten parallel (im Sinne der
infinitesimalen Parallelverschiebung) zueinander sind.
Wir wollen hier nicht genauer darauf eingehen, da die entsprechenden Rechnungen
etwas langwierig sind. Setzen wir statt dessen unsere Formeln oben ein:
\[
... \, =
\]
\[
=
\phi(p_{0}) +
[v(p_{0}) \, \phi] \, \epsilon' +
\frac{1}{2} \, [v(p_{0}) \, (v \, \phi)] \, \epsilon'^{2}
+
\]
\[
+
[u(p_{0}) \, \phi +
u(p_{0}) \, [v \, \phi] \, \epsilon'] \, \epsilon
+
\]
\[
+
\frac{1}{2} \, [u(p_{2}) \, (u \, \phi)] \, \epsilon^{2} +
\]
\[
-
\left[ \phi(p_{0}) +
[u(p_{0}) \, \phi] \, \epsilon +
\frac{1}{2} \, [u(p_{0}) \, (u \, \phi)] \, \epsilon^{2} \right] +
\]
\[
-
\left[ v(p_{0}) \, \phi +
v(p_{0}) \, [u \, \phi] \, \epsilon \right] \, \epsilon' +
\]
\[
-
\frac{1}{2} \, [v(p_{1}) \, (v \, \phi)] \, \epsilon'^{2} + \, ...
=
\]
\[
= \, ...
\]
Hier fließt bei den beiden quadratischen Termen
jeweils eine weitere Formel ein, die man mit Hilfe der Parallelität der Tangentialvektoren
begründen kann:
In nullter Ordnung sind
\[
[u(p_{2}) \, (u \, \phi)] = [u(p_{0}) \, (u \, \phi)]
\]
\[
[v(p_{1}) \, (v \, \phi)] = [v(p_{0}) \, (v \, \phi)]
\]
Damit ergibt sich:
\[ ... \, =
\]
\[ =
\phi(p_{0}) +
[v(p_{0}) \, \phi] \, \epsilon' +
\frac{1}{2} \, [v(p_{0}) \, (v \, \phi)] \, \epsilon'^{2}
+
\]
\[
+
[u(p_{0}) \, \phi] \, \epsilon +
u(p_{0}) \, [v \, \phi] \, \epsilon' \, \epsilon
+
\]
\[
+
\frac{1}{2} \, [u(p_{0}) \, (u \, \phi)] \, \epsilon^{2} +
\]
\[
-
\left[ \phi(p_{0}) -
[u(p_{0}) \, \phi] \, \epsilon -
\frac{1}{2} \, [u(p_{0}) \, (u \, \phi)] \, \epsilon^{2} \right] +
\]
\[
-
[v(p_{0}) \, \phi] \, \epsilon' -
v(p_{0}) \, [u \, \phi] \, \epsilon \, \epsilon' +
\]
\[
-
\frac{1}{2} \, [v(p_{0}) \, (v \, \phi)] \, \epsilon'^{2} + \, ...
=
\]
\[
=
u(p_{0}) \, [v \, \phi] \, \epsilon' \, \epsilon
-
v(p_{0}) \, [u \, \phi] \, \epsilon \, \epsilon'
+ \, ...
\]
Man definiert nun die sogenannte Lie-Klammer:
so dass wir als Endergebnis der ganzen Rechnung erhalten:
\[
\phi(p_{4}) - \phi(p_{3}) =
[u, v](p_{0}) \, \phi \, \epsilon \, \epsilon' + \, ...
\]
Um diesen Ausdruck besser zu verstehen, wollen wir die Lie-Klammer
explizit in Koordinaten ausschreiben
(wobei wir die Argumente und Koordinatenfunktionen teilweise
weglassen – Physiker-Kurzschreibweise!):
\[
[u, v](p) \, \phi =
\]
\[ =
u(p) \, [v \, \phi] -
v(p) \, [u \, \phi] =
\]
\[
= \sum_{\mu} \, u^{\mu} \frac{\partial}{\partial x^{\mu}}
\, \sum_{\nu} \, v^{\nu} \frac{\partial}{\partial x^{\nu}} \, \phi
+
\]
\[
- \sum_{\mu} \, v^{\mu} \frac{\partial}{\partial x^{\mu}}
\, \sum_{\nu} \, u^{\nu} \frac{\partial}{\partial x^{\nu}} \, \phi
=
\]
\[
= \sum_{\mu \nu}
\, \bigg[
u^{\mu} \frac{\partial v^{\nu}}{\partial x^{\mu}}
\frac{\partial}{\partial x^{\nu}} +
u^{\mu} \, v^{\nu} \frac{\partial}{\partial x^{\mu}} \frac{\partial}{\partial x^{\nu}}
+
\]
\[
\quad \quad \quad -
v^{\mu} \frac{\partial u^{\nu}}{\partial x^{\mu}}
\frac{\partial}{\partial x^{\nu}} -
v^{\mu} \, u^{\nu} \frac{\partial}{\partial x^{\mu}} \frac{\partial}{\partial x^{\nu}} \bigg]
\, \phi
=
\]
\[
= \sum_{\mu \nu}
\, \bigg[
u^{\mu} \frac{\partial v^{\nu}}{\partial x^{\mu}}
\frac{\partial}{\partial x^{\nu}}
-
v^{\mu} \frac{\partial u^{\nu}}{\partial x^{\mu}}
\frac{\partial}{\partial x^{\nu}} \bigg]
\, \phi
\]
Dabei haben wir verwendet, dass die partiellen Ableitungen
von \( \phi \) miteinander vertauschbar sind, so dass die entsprechenden Terme
wegfallen. Insgesamt haben wir also (diesmal korrekt geschrieben,
wobei wir
\[
\frac{\partial u^{\nu}}{\partial x^{\mu}} =
\frac{\partial}{\partial x^{\mu}}\bigg|_{p} u^{\nu} =
\]
\[ =
\frac{\partial (u^{\nu} \circ f^{ -1})}{\partial x^{\mu}} (f(p))
\]
mit der Karte \(f\) (siehe Kapitel 4:
Tangentialräume und Vektorfelder) schreiben:
\[
[u, v](p) =
\]
\[
=
\sum_{\mu \nu}
\, \bigg[
u^{\mu}(p) \frac{\partial}{\partial x^{\mu}}\bigg|_{p} v^{\nu}
+
\]
\[
\quad \quad \quad \quad \quad
-
v^{\mu}(p) \frac{\partial}{\partial x^{\mu}}\bigg|_{p} u^{\nu}
\bigg]
\, \frac{\partial}{\partial x^{\nu}}\bigg|_{p} =
\]
\[
=
\sum_{\nu} \,
\left[
u(p) \, v^{\nu}
-
v(p) \, u^{\nu} \right]
\, \frac{\partial}{\partial x^{\nu}}\bigg|_{p}
\]
Schaut man sich das Verhalten bei Koordinatenwechseln an, so stellt man
nach einer kurzen Rechnung (die wir hier überspringen) fest, dass
die Koeffizienten
\[
u(p) \, v^{\nu}
-
v(p) \, u^{\nu}
\]
sich wie die Komponenten eines Tangentialvektors verhalten, d.h.
die Lieklammer \( [u, v](p) \) ist ein
Tangentialvektor in \(p\). Fassen wir zusammen:
Lie-Klammer:
Durch die Lie-Klammer
\[
[u, v](p) \, \phi :=
\]
\[
u(p) \, [v \, \phi] -
v(p) \, [u \, \phi] =
\]
\[
=
\sum_{\nu} \,
\left[
u(p) \, v^{\nu}
-
v(p) \, u^{\nu} \right]
\, \frac{\partial}{\partial x^{\nu}}\bigg|_{p} \, \phi
\]
wird den in einer Umgebung von \(p\) definierten
Tangentialvektorfeldern \(u\) und \(v\) ein Tangentialvektor
\( [u, v](p) \) zugeordnet.
Dabei ist \( [v \, \phi] \) (und analog \( [u \, \phi] \))
als skalare Funktion zu sehen, die einem Punkt \(p\) die reelle Zahl
\( [v(p) \, \phi] \) zurordnet.
Wir werden uns die Lie-Klammer in einem späteren Kapitel im Zusammenhang
mit der sogenannten Lie-Ableitung noch
einmal genauer ansehen.
Zurück zu unserem Ergebnis
\[
\phi(p_{4}) - \phi(p_{3}) =
\]
\[ =
[u, v](p_{0}) \, \phi \, \epsilon \, \epsilon' + \, ...
\]
Dieses Ergebnis bedeutet, dass die Punkte \(p_{3}\) und \(p_{4}\)
nicht identisch sein müssen, denn die Werte von \(\phi\) können an den beiden Punkten verschieden sein.
Das infinitesimale Parallelogramm ist also nicht unbedingt nicht geschlossen.
Ursache dieser Lücke war, dass gemäß der Definition eines Parallelogramms
die \(u\)-Tangentialvektoren bzw. die \(v\)-Tangentialvektoren in den Ecken
parallel zueinander sind, was wir oben in der Rechnung
(ohne genaue Begründung im Detail) berücksichtigt haben.
Wir können die Lücke im infinitesimalen
Parallelogramm jedoch offensichtlich durch eine infinitesimale
Kurve von \(p_{3}\) nach \(p_{4}\) schließen, die als Tangentialvektor
die Lieklammer \( [u, v](p_{0}) \) besitzt und die wir vom Kurvenparameterwert \(0\)
bis zum Kurvenparameterwert \( \epsilon \epsilon' \) durchlaufen.
Achtung:
Um \( [u, v](p_{0}) \) zu berechnen, benötigen wir
die Vektorfelder \(u\) und \(v\) in einer Umgebung von \(p_{0}\).
Da wir von einem infinitesimalen Parallelogramm ausgegangen sind, gilt dabei
für diese Vektorfelder (wegen der Parallelität entlang der Kanten des Parallelogramms)
\[
D_{u(p_{0})} v = 0
\]
\[
D_{v(p_{0})} u = 0
\]
Nur dann haben wir ein infinitesimales Parallelogramm vor uns, und nur dann
ist die Lücke durch die Lie-Klammer gegeben.
Das muss man für die folgende Diskussion immer wieder beachten, sonst kommt es schnell
zu Missverständnissen.
Torsion
Man kann die Lücke im infinitesimalen Parallelogramm
auch ganz konkret ausrechnen.
Dabei geht man wie oben vor, wobei man die Kurven \(\gamma_{0}(t)\) usw.
als geodätische Linien ansetzt und die Tangentialvektoren entlang dieser Linien
paralleltransportiert (und so beispielsweise aus \(u(p_{0})\) dann
\(u(p_{2})\) gewinnt, was wiederum die Kurve \(\gamma_{\epsilon'}(t)\)
definiert usw.). Dies definiert unser Parallelogramm und liefert
die Rechtfertigung unserer obigen halb-anschaulichen Argumentation.
Als Ergebnis der Rechnung (die wir hier überspringen)
erhält man für die Koordinatendifferenz der Punkte \(p_{3}\) und \(p_{4}\)
die Formel
\[
f^{\rho}(p_{4}) - f^{\rho}(p_{3})
=
\]
\[ =
\sum_{\nu \mu} \,
( \Gamma^{\rho}_{\nu\mu} - \Gamma^{\rho}_{\mu\nu} )
\, u^{\mu}(p_{0}) \, v^{\nu}(p_{0}) \,
\epsilon \, \epsilon' + \, ...
\]
Dabei ist \(f^{\rho}\) die \(\rho\)-te Komponente der Koordinatenfunktion (Karte) \(f\).
Wir wollen im Folgenden die Abkürzung
verwenden, d.h. \( T^{\rho}_{\nu\mu} \)
enthält den antisymmetrischen Anteil des affinen Zusammenhangs.
Genau dieser antisymmetrische Anteil führt zur Lücke in den infinitesimalen Parallelogrammen,
wie die Formel oben für die Koordinatendifferenz der Punkte \(p_{3}\) und \(p_{4}\) zeigt.
Zum Vergleich: In Kapitel 6:
Kovariante Ableitung und Paralleltransport haben wir gesehen, dass der symmetrische Anteil
die geodätischen Linien bestimmt (siehe dort die
Differenzialgleichung einer geodätischen Linie in Koordinatendarstellung, die symmetrisch in
\(\mu\) und \(\nu\) ist).
Wir werden \( T^{\rho}_{\nu\mu} \) im Folgenden als
Torsion bezeichnen. Damit ist
\[
f^{\rho}(p_{4}) - f^{\rho}(p_{3})
=
\]
\[ =
\sum_{\nu\mu} \,
T^{\rho}_{\nu\mu}
\, u^{\mu}(p_{0}) \, v^{\nu}(p_{0}) \,
\epsilon \, \epsilon' + \, ...
\]
Da \( T^{\rho}_{\nu\mu} \) die Christoffelsymbole
\( \Gamma^{\rho}_{\nu\mu} \) des affinen Zusammenhangs
enthält, lässt sich die Torsion auch durch die kovariante Ableitung ausdrücken.
Rechnen wir dazu probeweise den folgenden Term aus in der Hoffnung,
daraus etwas über
\(
T^{\rho}_{\nu\mu} :=
\Gamma^{\rho}_{\nu\mu} - \Gamma^{\rho}_{\mu\nu} \)
ablesen zu können:
\[
D_{u(p)} v - D_{v(p)} u =
\]
\[
=
\sum_{\rho} \, \left[
u(p) \, v^{\rho}
+
\sum_{\nu\mu} \,
v^{\mu}(p) \, \Gamma^{\rho}_{\nu\mu}
\, u^{\nu}(p)
\right] \, \frac{\partial}{\partial x^{\rho}} \bigg|_{p}
+
\]
\[
-
\sum_{\rho} \, \left[
v(p) \, u^{\rho}
+
\sum_{\nu\mu} \,
u^{\mu}(p) \, \Gamma^{\rho}_{\nu\mu}
\, v^{\nu}(p)
\right] \, \frac{\partial}{\partial x^{\rho}} \bigg|_{p}
=
\]
... Umsortieren und in der zweiten Doppelsumme die Indizes umbenennen:
\[
=
\sum_{\rho} \, \bigg[
u(p) \, v^{\rho}
-
v(p) \, u^{\rho}
+
\]
\[
+
\sum_{\nu\mu} \, \big[
v^{\mu}(p) \, \Gamma^{\rho}_{\nu\mu}
\, u^{\nu}(p)
+
\]
\[
\quad \quad \quad \quad \quad
-
u^{\nu}(p) \, \Gamma^{\rho}_{\mu\nu}
\, v^{\mu}(p) \big]
\bigg]
\, \frac{\partial}{\partial x^{\rho}}\bigg|_{p}
=
\]
\[
=
\sum_{\rho} \, \left[
u(p) \, v^{\rho}
-
v(p) \, u^{\rho} \right] \, \frac{\partial}{\partial x^{\rho}}\bigg|_{p} +
\]
\[
+
\sum_{\rho} \,
\sum_{\nu\mu} \,
T^{\rho}_{\nu\mu}
\, u^{\nu}(p) \, v^{\mu}(p) \,
\frac{\partial}{\partial x^{\rho}}\bigg|_{p}
=
\]
\[
=:
[u, v](p)
+
T(u(p), v(p))
\]
oder anders geschrieben:
Da \( D_{u(p)} v \) sowie \( D_{v(p)} u \)
und \( [u, v](p) \) Tangentialvektoren in \(p\) sind,
ist auch \( T(u(p), v(p)) \) ein Tangentialvektor in \(p\).
Weiter sieht man, dass \( T(u(p), v(p)) \)
antisymmetrisch in \(u(p)\) und \(v(p)\) ist.
Und schließlich hängt \( T(u(p), v(p)) \) wirklich nur vom \(u\) und \(v\) im Punkt \(p\) ab,
und nicht von den Werten von \(u\) und \(v\) in einer Umgebung von \(p\), wie bereits unsere
Ausgangsformel
\[
T^{\rho}_{\nu\mu} :=
\Gamma^{\rho}_{\nu\mu} - \Gamma^{\rho}_{\mu\nu}
\]
zeigt.
Das ist auf den ersten Blick erstaunlich, denn die kovarianten Ableitungen
\( D_{u(p)} v \) und \( D_{v(p)} u \)
und auch die Lie-Klammer \( [u, v](p) \) hängen sehr wohl
von einer Umgebung von \(p\) ab.
Die Kombination
\( D_{u(p)} v - D_{v(p)} u - [u, v](p) \)
sorgt jedoch gerade dafür, dass die Richtungsableitungen der Vektorkomponenten
wegfallen und nur die Christoffelsymbole übrig bleiben.
Wir können natürlich in der obigen Formel für \( T(u(p), v(p)) \)
auch die speziellen Basisvektoren \( u(p) = \frac{\partial}{\partial x^{\nu}}\bigg|_{p} \)
und \( v(p) = \frac{\partial}{\partial x^{\mu}}\bigg|_{p} \) einsetzen.
Dann fällt die Lie-Klammer weg, da die partiellen Ableitungen nach den Koordinaten
miteinander vertauschbar sind (man sagt, die Basisvektoren sind holonom),
und wir erhalten
\[
T \left( \frac{\partial}{\partial x^{\nu}}\bigg|_{p} , \frac{\partial}{\partial x^{\mu}}\bigg|_{p} \right)
=
\]
\[ =
D_{\nu} \frac{\partial}{\partial x^{\mu}} - D_{\mu} \frac{\partial}{\partial x^{\nu}}
\]
was schließlich die Formel
\(
T^{\rho}_{\nu\mu} =
\Gamma^{\rho}_{\nu\mu} - \Gamma^{\rho}_{\mu\nu} \)
reproduziert.
Kehren wir noch einmal zu unserem infinitesimalen Parallelogramm zurück.
Wir hatten gesehen, dass die Lücke in diesem Parallelogramm gerade gleich
\[
\phi(p_{4}) - \phi(p_{3}) =
[u, v](p_{0}) \, \phi \, \epsilon \, \epsilon' + \, ...
\]
ist. Dabei war \(u\) ein paralleles Vektorfeld entlang der \(v(p)\)-Kurve und umgekehrt,
d.h. \( D_{v(p)} u = 0 \) und \( D_{u(p)} v = 0 \).
Für solche Vektorfelder haben wir
\[
T(u(p), v(p)) =
\]
\[ =
D_{u(p)} v - D_{v(p)} u - [u, v](p) =
\]
\[
=
- [u, v](p)
\]
Wir können für die Lücke mit diesen Parallelogramm-Vektorfeldern daher auch schreiben:
\[
\phi(p_{4}) - \phi(p_{3}) =
\]
\[ =
- T(u(p_{0}), v(p_{0})) \, \phi \, \epsilon \, \epsilon' + \, ...
\]
Andererseits hatten wir für die Koordinaten der beiden Punkte der Lücke
die folgende Beziehung erhalten:
\[
f^{\rho}(p_{4}) - f^{\rho}(p_{3})
=
\]
\[
=
\sum_{\nu \mu} \,
T^{\rho}_{\nu\mu}
\, u^{\mu}(p_{0}) \, v^{\nu}(p_{0}) \,
\epsilon \, \epsilon' + \, ...
=
\]
\[
= -
T^{\rho}(u(p_{0}), v(p_{0})) \,
\epsilon \, \epsilon' + \, ...
\]
wobei
\[
T^{\rho}(u(p_{0}), v(p_{0})) =
\]
\[
\sum_{\nu \mu} \,
T^{\rho}_{\nu\mu}
\, u^{\nu}(p_{0}) \, v^{\mu}(p_{0})
=
\]
\[
- \sum_{\nu\mu} \,
T^{\rho}_{\nu\mu}
\, u^{\mu}(p_{0}) \, v^{\nu}(p_{0})
\]
die \(\rho\)-te Komponente des Tangentialvektors
\( T(u(p), v(p)) \) ist.
Diese Formel für \( f^{\rho}(p_{4}) - f^{\rho}(p_{3}) \) lässt sich leicht aus dem Ausdruck für
\( \phi(p_{4}) - \phi(p_{3}) \) ableiten,
wenn wir einfach \( \phi = f^{\rho} \) setzen und
\(
\frac{\partial}{\partial x^{\rho'}}\bigg|_{p}
\, f^{\rho}
= \delta^{\rho}_{\, \rho'} \) verwenden:
\[
f^{\rho}(p_{4}) - f^{\rho}(p_{3})
=
\]
\[
= -
T(u(p_{0}), v(p_{0})) \, f^{\rho} \, \epsilon \, \epsilon' + \, ...
=
\]
\[
= - \sum_{\rho'} \,
T^{ \rho'}(u(p_{0}), v(p_{0}))
\, \frac{\partial}{\partial x^{\rho'}} \bigg|_{p}
\, f^{\rho} \, \epsilon \, \epsilon' + \, ...
=
\]
\[
= -
T^{\rho}(u(p_{0}), v(p_{0}))
\, \epsilon \, \epsilon' + \, ...
\]
Man sieht, wie alles konsistent zusammenpasst.
Noch eine Randbemerkung:
Wir haben oben gerade verwendet, dass
die kovarianten Ableitungen der Vektorfelder \(u\) und \(v\) verschwinden, wenn diese
parallel entlang der Seiten des infinitesimalen Parallelogramms sein sollen
(so ist ein infinitesimalen Parallelogramm gerade definiert).
Man könnte nun meinen, dass dann gar keine Christoffelsymbole in dem Ausdruck
\[
f^{\rho}(p_{4}) - f^{\rho}(p_{3})
=
\]
\[ =
\sum_{\nu\mu} \,
( \Gamma^{\rho}_{\nu\mu} - \Gamma^{\rho}_{\mu\nu} )
\, u^{\mu}(p_{0}) \, v^{\nu}(p_{0}) \,
\epsilon \, \epsilon' + \, ...
\]
vorkommen dürften, denn wenn die kovariante Ableitung verschwindet, müssten doch auch
die Christoffelsymbole verschwinden?!
Das ist jedoch ein Trugschluss, denn
\( D_{v(p)} u = 0 \) bedeutet ausgeschrieben
\[
D_{v(p)} u =
\sum_{\rho} \, \bigg[
v(p) \, u^{\rho}
+
\]
\[ +
\sum_{\mu \nu} \,
u^{\mu}(p) \, \Gamma^{\rho}_{\nu\mu}
\, v^{\nu}(p)
\bigg] \, \frac{\partial}{\partial x^{\rho}}\bigg|_{p} =
\]
\[ = 0
\]
und somit
\[
v(p) \, u^{\rho}
=
- \sum_{\mu \nu} \,
u^{\mu}(p) \, \Gamma^{\rho}_{\nu\mu}
\, v^{\nu}(p)
\]
Die Christoffelsymbole verschwinden also keineswegs, sondern
Richtungsableitungen lassen sich durch Christoffelsymbole ausdrücken.
Daher lässt sich bei einem infinitesimalen Parallelogramm
die Lie-Klammer durch antisymmetrisch kombinierte Christoffelsymbole ausdrücken und umgekehrt.
Und noch ein interessanter Punkt:
Nehmen wir wieder den Spezialfall
\[
u = \frac{\partial}{\partial x^{\nu}}
\]
\[
v = \frac{\partial}{\partial x^{\mu}}
\]
(das sind Tangential-Vektorfelder und nicht nur Tangential-Vektoren,
denn wir benötigen Vektor-Felder,
um Lie-Klammer und kovariante Ableitungen bilden zu können).
In diesem Fall fällt die Lie-Klammer \( [u, v] \) weg, da die partiellen Ableitungen
in die Koordinatenrichtungen miteinander vertauschen.
Nun ist andererseits
\[
\phi(p_{4}) - \phi(p_{3}) =
\]
\[ =
[u, v](p_{0}) \, \phi \, \epsilon \, \epsilon' + \, ...
\]
d.h. für unseren Spezialfall ist
\[
\phi(p_{4}) - \phi(p_{3}) = 0
\]
Es scheint also keine Lücke im infinitesimalen Parallelogramm zu geben, wenn die Kantenvektoren
in die Richtung der Koordinatenlinien zeigen.
Andererseits hatten wir oben auch die Beziehung
\[
f^{\rho}(p_{4}) - f^{\rho}(p_{3})
=
\]
\[ =
-
T^{\rho}(u(p_{0}), v(p_{0})) \,
\epsilon \, \epsilon' + \, ...
\]
für die Lücke hergeleitet. Das aber ist nun verwirrend:
Da es in unserem Spezialfall keine Lücke gibt, müsste darauf folgen, dass
die Torsion \( T^{\rho}_{\nu\mu} \) Null ist.
Das aber kann nicht sein, denn aus dem Spezialfall kann nicht folgen,
dass die Torsion generell immer Null sein muss. Was also ist hier faul?
Wir kommen auf die Lösung, wenn wir uns die kovariante Ableitung ansehen:
\[
D_{\nu}
\frac{\partial}{\partial x^{\mu}} =
\sum_{\rho} \,
\Gamma^{\rho}_{\nu\mu}
\, \frac{\partial}{\partial x^{\rho}}
\]
(mit der Schreibweise
\( D_{\nu} = D_{\frac{\partial}{\partial x^{\nu}} \bigg|_{p}} \) ).
Die Forderung, dass wir ein infinitesimales Parallelogramm vor uns haben, würde aber
\[
D_{\nu}
\frac{\partial}{\partial x^{\mu}} = 0
\]
bedeuten, d.h. die Christoffelsymbole
\(
\Gamma^{\rho}_{\nu\mu}
\)
müssten gleich Null sein. Das wäre der Fall, wenn wir es mit geradlinigen Koordinaten
zu tun hätten. In diesem Fall hätten wir tatsächlich ein Parallelogramm vor uns,
und die Torsion wäre Null.
Bei krummlinigen Koordinaten jedoch, die bei vielen Mannigfaltigkeiten
unvermeidlich sind, sind die Christoffelsymbole normalerweise ungleich Null,
und daher ist auch \( D_{\nu}
\frac{\partial}{\partial x^{\mu}} \) ungleich Null.
Entsprechend können die Tangentialvektorfelder in Richtung der Koordinatenlinien
(also die Vektoren \( \frac{\partial}{\partial x^{\mu}} \) ) bei krummlinigen
Koordinaten kein Parallelogramm aufspannen! Sie sind entlang der Parallelogramm-Linien
nicht parallel.
Wenn man sich sphärische Polarkoordinaten in der zweidimensionalen Ebene vorstellt,
leuchtet das auch anschaulich unmittelbar ein.
Was bedeutet Torsion anschaulich?
Wie sieht es mit einer anschaulichen Interpretation der Torsion aus?
Bisher wissen wir:
Die Torsion bestimmt die Lücke in infinitesimalen Parallelogrammen.
Im Internet (Quelle leider nicht mehr verfügbar) hatte ich einmal
die folgende sehr schöne Formulierung gefunden:
Wenn die Torsion nicht verschwindet, verhalten sich Parallelogramme
wie Schraubengewinde. Folgt man der Rille eines Gewindes –
das ist eine abgerundete Version des Parallelogramms –
einmal rechts und ein anderes Mal links halb herum,
so endet man nicht am selben Ort, sondern um eine Ganghöhe versetzt.
Die Torsion hat keinen Einfluss auf geodätische Linien, da diese Linien
nur vom symmetrischen Anteil der Christoffelsymbole abhängen, wie die Differentialgleichung
der geodätischen Linien zeigt (siehe Kapitel 6:
Kovariante Ableitung und Paralleltransport ).
Nehmen wir zur weiteren Veranschaulicheng eine Einbettung zu Hilfe:
Bei einer Einbettung hatten wir die Christoffelsymbole
definiert durch (siehe Kapitel 6:
Kovariante Ableitung und Paralleltransport ):
\[
\frac{\partial}{\partial x^{\nu}} \frac{\partial \boldsymbol{X}(x)}{\partial x^{\mu}}
=:
\]
\[ =:
\sum_{\rho} \, \Gamma^{\rho}_{\nu\mu}
\frac{\partial \boldsymbol{X}(x)}{\partial x^{\rho}}
+ h_{\nu\mu} \boldsymbol{N}
\]
Dabei war \( \boldsymbol{X} = f^{-1} \) eine Parametrisierung
der Mannigfaltigkeit im umgebenden \( \mathbb{R}^{n} \), d.h. \( p = \boldsymbol{X}(x) \)
ist ein Punkt auf der Mannigfaltigkeit, gleichzeitig gesehen als Punkt im
Einbettungsraum \(\mathbb{R}^{n}\), und \( x = f(p) \) sind die Koordinaten dieses
Punktes.
Nun sind die partiellen Ableitungen aber vertauschbar, d.h. es ist
\[
\frac{\partial}{\partial x^{\nu}} \frac{\partial \boldsymbol{X}(x)}{\partial x^{\mu}} =
\frac{\partial}{\partial x^{\mu}} \frac{\partial \boldsymbol{X}(x)}{\partial x^{\nu}}
\]
und somit auch
\[
\Gamma^{\rho}_{\nu\mu} =
\Gamma^{\rho}_{\nu\mu}
\]
d.h. die Torsion ist Null!
Wenn wir eine Einbettung voraussetzen und die kovarianten Ableitung
durch Projektion der Richtungsableitung
eines Tangentialvektors auf den Tangentialraum definieren, so
sind die Christoffelsymbole symmetrisch, d.h. die Torsion ist Null.
Haben Sie mal versucht, im Internet ein Beispiel für eine zweidimensionale
Fläche im dreidimensionalen Raum zu finden, die anschaulich eine Torsion
besitzt? Flächen mit Krümmung findet man an jeder Ecke, aber Flächen mit
Torsion sucht man vergeblich. Nun wissen wir auch, warum: es gibt keine,
zumindest nicht mit der obigen anschaulichen Definition der kovarianten Ableitung!
Nun wissen wir aber, dass man nach dem Einbettungssatz von Whitney
(siehe Kapitel 5:
Co-Tangentialräume und Differentialformen ) jede differenzierbare Mannigfaltigkeit im
\( \mathbb{R}^{n} \) einbetten kann, wenn man \(n\) groß genug wählt.
Was wird dann aber aus Mannigfaltigkeiten mit Torsion?
Die Lösung lautet: Die kovariante Ableitung lässt sich bei Torsion nicht mehr
allein durch Projektion der Richtungsableitung
eines Tangentialvektors auf den Tangentialraum definieren.
Die über die nicht-symmetrischen Christoffelsymbole definierte
kovariante Ableitung besitzt nicht mehr die bisherige anschauliche Bedeutung.
Anders gesagt: Nicht-symmetrische Christoffelsymbole bewirken, dass
die Richtungsableitung des Tangentialvektors nicht nur auf den Tangentialraum projeziert wird,
sondern dass dieser Vektor anschließend noch weiter verändert wird.
Wie diese Veränderung genau aussieht, legt der antisymmetrische Anteil der
Christoffelsymbole (also die Torsion) fest. Dazu schreiben wir
\[
\Gamma^{\rho}_{\nu\mu}
=
\]
\[ =
\frac{1}{2} \, ( \Gamma^{\rho}_{\nu\mu} + \Gamma^{\rho}_{\mu\nu} )
+
\frac{1}{2} \, ( \Gamma^{\rho}_{\nu\mu} - \Gamma^{\rho}_{\mu\nu} )
=
\]
\[
=:
\Gamma^{\rho}_{(\nu\mu)}
+
\frac{1}{2} T^{\rho}_{\nu\mu}
\]
Dabei ist
\[
\Gamma^{\rho}_{(\nu\mu)} :=
\frac{1}{2} \,
( \Gamma^{\rho}_{\nu\mu} + \Gamma^{\rho}_{\mu\nu} )
\]
der symmetrische Anteil des affinen Zusammenhangs und
die Torsion
\[
T^{\rho}_{\nu\mu} =
\Gamma^{\rho}_{\nu\mu} - \Gamma^{\rho}_{\mu\nu}
\]
der antisymmetrische Anteil.
Damit können wir nun die kovariante Ableitung bei Einbettung schreiben als
\[
D_{v(p)} u =
\sum_{\rho} \, \bigg[
v(p) \, u^{\rho}
+
\]
\[ +
\sum_{\mu\nu} \,
u^{\mu}(p) \, \Gamma^{\rho}_{\nu\mu}
\, v^{\nu}(p)
\bigg] \, \frac{\partial \boldsymbol{X}(x)}{\partial x^{\rho}} =
\]
\[
=
\sum_{\rho} \, \bigg[
v(p) \, u^{\rho}
+
\]
\[ +
\sum_{\mu\nu} \,
u^{\mu}(p) \,
\big( \Gamma^{\rho}_{(\nu\mu)}
+
\frac{1}{2} T^{\rho}_{\nu\mu} \big)
\, v^{\nu}(p)
\bigg] \, \frac{\partial \boldsymbol{X}(x)}{\partial x^{\rho}}
\]
Wir können nun die Einbettung so wählen, dass
\[
\frac{\partial}{\partial x^{\nu}} \frac{\partial \boldsymbol{X}(x)}{\partial x^{\mu}}
=:
\sum_{\rho} \, \Gamma^{\rho}_{(\nu\mu)}
\frac{\partial \boldsymbol{X}(x)}{\partial x^{\rho}}
+ h_{\nu\mu} \boldsymbol{N}
\]
mit dem symmetrischen \(\Gamma^{\rho}_{(\nu\mu)}\) (!) gilt. Anders ausgedrückt:
Über eine Einbettung lässt sich der symmetrische Anteil des affinen
Zusammenhangs so festlegen – man sagt, die Einbettung induziert
den symmetrischen Anteil des affinen Zusammenhangs.
Wir können diesen symmetrischen
Anteil also wieder als Projektion der Richtungsableitung schreiben
(siehe Kapitel 6
Kovariante Ableitung und Paralleltransport ). Den antisymmetrischen Anteil wiederum können wir mit
Hilfe der Torsion als
\[
T(u(p), v(p)) :=
\]
\[ =
\sum_{\rho} \,
\sum_{\nu\mu} \,
T^{\rho}_{\nu\mu}
\, u^{\nu}(p) \, v^{\mu}(p)
\frac{\partial \boldsymbol{X}(x)}{\partial x^{\rho}}\bigg|_{p}
\]
schreiben.
Wenn wir das alles in unserer Formel
\[
D_{v(p)} u =
=
\sum_{\rho} \, \bigg[
v(p) \, u^{\rho}
+
\]
\[ +
\sum_{\mu\nu} \,
u^{\mu}(p) \,
\big( \Gamma^{\rho}_{(\nu\mu)}
+
\frac{1}{2} T^{\rho}_{\nu\mu} \big)
\, v^{\nu}(p)
\bigg] \, \frac{\partial \boldsymbol{X}(x)}{\partial x^{\rho}}
\]
verwenden, erhalten wir das Ergebnis:
\[
D_{v(p)} u =
P\bigg|_{T(p)} \frac{d}{dt} u(\gamma(t)) \bigg|_{t = 0}
-
\frac{1}{2} T(u(p), v(p))
\]
Die kovariante Ableitung \( D_{v(p)} u \)
enthält also neben der Projektion der Richtungsableitung
\[
P\bigg|_{T(p)} \frac{d}{dt} u(\gamma(t)) \bigg|_{t = 0}
\]
als zweiten Term den Torsionsanteil
\[
-
\frac{1}{2} T(u(p), v(p))
\]
Dieser Torsionsanteil ist durch unsere Einbettung nicht vorgegeben,
anders als der symmetrische Anteil. Das zeigt, dass wir hier eine
zusätzliche Freiheit in der Festlegung des affinen Zusammenhangs
haben, die verträglich mit allen geforderten Eigenschaften der zugehörigen
kovarianten Ableitung ist. Zwar legt unsere Anschauung bei einer
Einbettung die Wahl \( T(u(p), v(p)) = 0 \) nahe, aber eine Einbettung
repräsentiert nicht immer in guter Art und Weise die wichtigen Eigenschaften
einer Mannigfaltigkeit – dies hatten wir in Kapitel 5:
Co-Tangentialräume und Differentialformen am Beispiel der
projektiven Räume bereits gesehen.
Beispiel: ein vollkommen antisymmetrischer konstanter affiner Zusammenhang im dreidimensionalen Raum
Schauen wir uns als Beispiel einen vollkommen antisymmetrischen konstanten affinen
Zusammenhang im dreidimensionalen Raum \( \mathbb{R}^{3} \) an.
Wegen der Antisymmetrie des Zusammenhangs liegt eine Torsion vor.
Wie es mit der Krümmung aussieht, schauen wir uns im nächsten Kapitel an.
Auf eine Einbettung wollen wir verzichten – diese kann uns in Bezug auf die Torsion ja sowieso nicht
weiterhelfen.
Betrachten wir nun die zugehörige Paralleltransport-Differentialgleichung
für den Paralleltransport eines Vektors \(u\) entlang einer Kurve \(\gamma\) (siehe
Kapitel 6
Kovariante Ableitung und Paralleltransport ):
\[
\frac{d}{dt'} u^{\rho}(\gamma(t')) \bigg|_{t' = t}
+
\]
\[ +
\sum_{\mu\nu} \,
u^{\mu}(\gamma(t)) \, \Gamma^{\rho}_{\nu\mu}(\gamma(t))
\, v^{\nu}(\gamma(t))
= 0
\]
Dabei sind \(v^{\nu}\) die vorgegebenen Koeffizienten des zu \(\gamma(t)\)
gehörenden Tangentialvektors.
Wir verwenden im Folgenden karthesische Koordinaten.
Da \( \Gamma^{\rho}_{\nu\mu} \) vollkommen
antisymmetrisch sein soll, gilt
\[
\Gamma^{\rho}_{\nu\mu} =
\frac{1}{2} T^{\rho}_{\nu\mu}
\]
wobei
\( T^{\rho}_{\nu\mu} \) nicht vom Ort abhängt
(der affine Zusammenhang sollte ja konstant sein).
Die geodätischen Linien sind einfach Geraden, denn
die Differentialgleichung für geodätische Linien (siehe Kapitel 6
Kovariante Ableitung und Paralleltransport ) vereinfacht sich bei
antisymmetrischen Christoffelsymbolen zu einer Geradengleichung
(das muss auch so sein, denn diese Geodäten-Differentialgleichung enthält nur den
symmetrischen Anteil der Christoffelsymbole, und der ist hier gleich Null).
Als Kurven verwenden wir daher im Folgenden einfach diese Geraden,
d.h. der Kurven-Tangentenvektor ist konstant:
\( v^{\nu}(\gamma(t)) = v^{\nu} \).
Die vereinfachte Paralleltransport-Gleichung lautet also:
\[
\frac{d}{dt'} u^{\rho}(\gamma(t')) \bigg|_{t' = t} +
\]
\[
+
\sum_{\mu\nu} \,
\frac{1}{2} \, u^{\mu}(\gamma(t)) \, T^{\rho}_{\nu\mu}
\, v^{\nu}
= 0
\]
Übersetzen wir diese Gleichung zur besseren Übersicht in eine Matrixgleichung:
Wir definieren die konstante Matrix \(A(v)\)
als
\[
\sum_{\nu} \, \frac{1}{2} \, T^{\rho}_{\nu\mu}
\, v^{\nu} =: A(v)^{\rho}_{\, \mu}
\]
d.h.
\[
A(v)^{\rho}_{\, \mu}
= \frac{1}{2} T^{\rho}(v, e_{\mu})
\]
Weiter schreiben wir \( u(\gamma(t')) \) für den Spaltenvektor
mit Komponenten \( u^{\rho}(\gamma(t')) \). Die Paralleltransport-Gleichung
ist dann gegeben durch die Matrixgleichung
\[
\frac{d}{dt'} u(\gamma(t')) \bigg|_{t' = t}
+
A(v) \, u(\gamma(t))
= 0
\]
Diese Gleichung besitzt die Lösung
\[
u(\gamma(t)) = e^{- t \, A(v)} \, u(\gamma(0))
\]
wie man durch Einsetzen leicht nachprüft.
Wir können nun verschiedene Beispiele für eine konstante Torsion ausprobieren
und uns ansehen, wie sich \(u\) bei einer Parallelverschiebung entlang der \(v\)-Geraden
verhält. Ein naheliegendes Beispiel ist
\[
T^{\rho}_{\nu\mu}
= 2 \, \epsilon^{\rho}_{\,\nu\mu}
\]
Dabei ist \( \epsilon^{\rho}_{\,\nu\mu} \)
gleich Null für zwei gleiche Indices, antisymmetrisch bei Vertauschung zweier Indices
und es ist \( \epsilon^{1}_{\, 2 3} = \) \(
\epsilon^{2}_{\, 3 1} = \) \( \epsilon^{3}_{\, 1 2} = 1\).
Berechnen wir dazu \( A(v) \, u \) : Es ist
\[
(A(v) \, u)^{\rho} =
\]
\[
= \sum_{\mu} \, A(v)^{\rho}_{\, \mu} \, u^{\mu}
= \]
\[
=
\sum_{\mu\nu} \, \frac{1}{2} T^{\rho}_{\nu\mu}
\, v^{\nu} \, u^{\mu}
=
\]
\[
=
\sum_{\mu\nu} \, \epsilon^{\rho}_{\, \nu\mu}
\, v^{\nu} \, u^{\mu}
=
\]
\[
=
(v \times u)^{\rho}
\]
mit dem bekannten Kreuz-Vektorprodukt \( v \times u \) dreidimensionaler Vektoren.
Insgesamt ist also in unserem Beispiel
\[
A(v) \, u = v \times u
\]
Aus Die Symmetrie der Naturgesetze,
Kapitel 3.4, Die spezielle Relativitätstheorie - Drehungen
wissen wir, dass dann
\[
e^{- t \, A(v)}
\]
eine Drehung um die \(v\)-Achse mit Drehwinkel \( - t \, |v| \) ist.
Die Parallelverschiebung eines Vektors \(u\) entlang einer Geraden in \(v\)-Richtung
führt also zu einer Drehung von \(u\) um die Geradenrichtung. Die Spitze des \(u\)-Vektors
führt bei der Parallelverschiebung mit wachsendem \(t\) eine schraubenartige
Bewegung um die \(v\)-Gerade aus, während sich der Fußpunkt von \(u\) entlang der Geraden bewegt
(genau so bewegt sich ein geladenes Teilchen in einem konstanten Magnetfeld).
Das macht deutlich, warum wir hier von Torsion reden, denn eine Parallelverschiebung
hängt offenbar eng mit schraubenartigen Verdrehungen zusammen – zumindest in diesem Beispiel.
Das Beispiel macht sehr schön den Unterschied zwischen den Begriffen parallel
und geradeaus deutlich:
Der Begriff geradeaus bezieht sich auf eine
geodätische Linie. Diese Linie interpretieren wir als diejenige Kurve, die
bei einem gegebenen affinen Zusammenhang so geradeaus wie möglich
verläuft. Dabei ist nur der symmetrische Anteil der Christoffelsymbole
relevant, d.h. eine Torsion hat keinen Einfluss auf geodätische Linien.
In unserem Beispiel oben sind die geodätischen Linien daher einfach Geraden
im \(\mathbb{R}^{3}\). Bei Parallelverschiebung des Tangentenvektors
einer solchen Geraden entlang dieser Geraden ändert sich der Tangentenvektor nicht,
denn eine Parallelverschiebung führt in unserem Beispiel ja zu einer Drehung um
die Gerade und hat daher keinen Einfluss auf einen Vektor, der parallel zur Geraden liegt.
Der Begriff parallel bezieht sich auf die Parallelverschiebung
eines Vektors \(u(p)\) entlang einer Kurve \(\gamma\). Zwei Vektoren \(u(p)\) und \(u(q)\)
mit \(p\) und \(q\) auf der Kurve gelten als parallel bezüglich \(\gamma\),
wenn sie sich durch Parallelverschiebung entlang der Kurve \(\gamma\) ineinander
überführen lassen. In unserem Beispiel sind zwei Vektoren
\(u(0)\) und \(u(tv)\) parallel bezüglich der Geraden \(\gamma(t) = t v \), wenn
\(u(tv)\) durch Drehung um den Winkel \( - t \, |v| \) um die \(v\)-Achse
aus \(u(0)\) hervorgeht. Hierbei spielt die Torsion eine entscheidende Rolle!
Damit wird auch klar, warum ein Parallelogramm hier nicht geschlossen sein kann:
Die Richtungsvektoren werden beim Paralleltransport entlang der Kanten verdreht.
Drehungen vertauschen aber nicht miteinander!
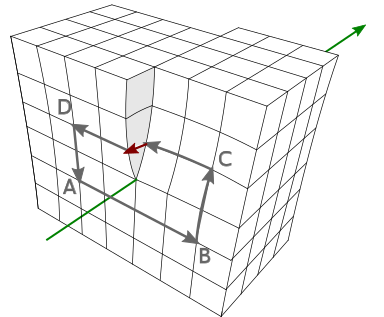
Beispiel: Torsion in Kristallgittern
Nun mutet das obige Beispiel vielleicht etwas künstlich an.
Gibt es auch Beispiele, bei denen eine Torsion ganz natürlich auftritt
(wobei das obige Beispiel durchaus auf Magnetfelder anwendbar sein sollte)?
In den Jahren 1952 bis 1955 haben Kondo, Bilby, Bullough and Smith
ein solches Anwendungsbeispiel gefunden. Sie studierten Gitterfehler
in Festkörpern, insbesondere Stufenversetzungen und Schraubenversetzungen:
Schraubenversetzung in einem Kristall.
Der rote Vektor entspricht unserer Lücke
im Parallelogramm (siehe Bild ganz oben).
Quelle: Ausschnitt aus
File:Burgers Vector and dislocations (screw and edge type).svg,
Credit: Martin Fleck, CC BY-SA 4.0.
Man kann nun solche Versetzungen mit einem Parallelogramm umrunden,
wobei man den Kurvenparameter so wählt, dass der Abstand zwischen
Gitterpunkten immer einer Parameterdistanz \( \epsilon \) entspricht,
und wobei man Gitterlinien als zueinander parallel interpretiert.
Auf diese Weise ergibt ein Gitterfehler eine nicht-verschwindende
Torsion im Punkt der Versetzung, denn das Parallelogramm hat eine Lücke.
Man kann nun einen Kontinuums-Grenzwert definieren, indem man den Gitterabstand
gegen Null gehen lässt und dabei die Dichte der Versetzungen
konstant lässt (was das genau bedeutet, überspringen wir hier).
Auf diese Weise erhält man eine Kontinuumstheorie der Versetzungen, bei der
die Torsion die Versetzungen im Kristall darstellt. Das liefert eine anschauliche
Interpretation der Torsion als Kontinuums-Grenzwert einer Gittertheorie
mit Versetzungen.
Ein anderes Beispiel, bei dem Torsion wichtig wird, ist die
Einstein-Cartan-Theorie der Gravitation
(siehe z.B. Wikipedia: Einstein-Cartan theory ).
Diese Theorie hat ihren Ursprung in der Erkenntnis, dass Einsteins allgemeine Relativitätstheorie
der Gravitation gewisse Schwierigkeiten mit Drehimpulsen und deren Austausch hat.
Nun setzt man in der allgemeinen Relativitätstheorie die Torsion gleich Null, da kein Grund
für eine nichtverschwindende Torsion vorzuliegen scheint.
In der Einstein-Cartan-Theorie versucht man nun, mit Hilfe einer Torsion
die Drehimpuls-Probleme der allgemeinen Relativitätstheorie auszuräumen.
.svg){kind=link}